本記事では、ラズパイからサーボモーターを制御する方法を紹介します。
ラズパイから直接サーボモータの電源を取ると、
ラズパイ側の動作が不安定になる可能性があるので、サーボモータ用のドライバを使用しています。
この記事で分かること
本記事を読み終わると、下記の内容が分かるようになります。
- ラズパイからサーボモータを制御するために必要な部品
- 各部品の接続
- ラズパイでI2C通信する方法
- サーボドライバ制御用ライブラリのインストール方法
- サーボドライバ制御のpythonのサンプルコード
スポンサーリンク
用意したサーボドライバとサーボモータ など
ラズパイからサーボモータを動かすために用意したものは、下の写真のとおりです。
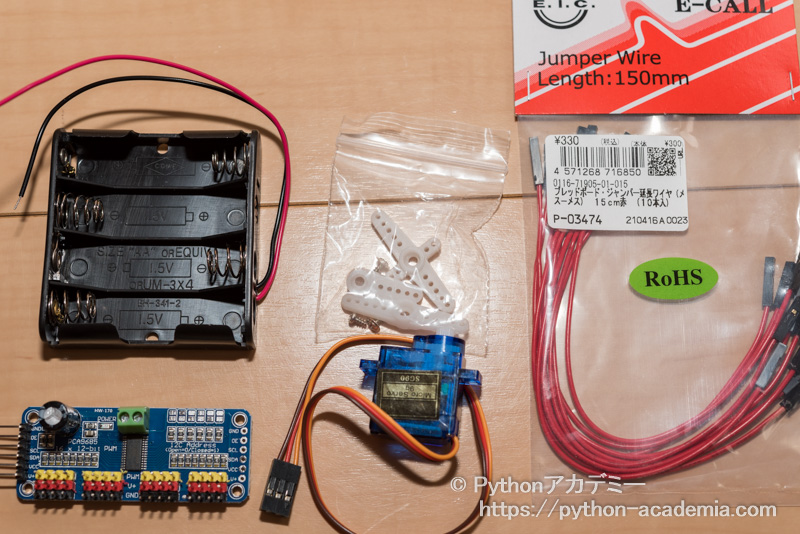
リンクがある方が分かりやすいので、部品ごとに改めて紹介します。
サーボモータドライバ
ラズパイとI2C接続することで、16台までのサーボモータを制御出来ます。
PWM制御に対応しています。

この商品は、Adafruit社のPCA9685搭載16チャネル PWM/サーボ ドライバー の廉価版です。
信頼性を重視する用途では、Adafruit社の製品を購入することをオススメします。
筆者は趣味用途での使用のため、価格重視でHiLetgo社製のドライバを購入しました。
サーボモータ
サーボモータの定番の "SG90" を使用しました。
制御角は ±約90°(180°) です。

ジャンパーワイヤー
ラズパイと、サーボモータドライバの結線に、メスメスのジャンパワイヤーが必要です。
こちらのジャンパワイヤは、オスオス、オスメス、メスメスのセットです。

電子工作を楽しみたい方は、持っておくと便利だと思います。
電池ボックス
サーボモータドライバに電圧を供給するための電池ボックスです。
サーボモータの動作電圧が4.8Vのため、単3電池4本用のケースを使用しています。

スポンサーリンク
ラズパイ、サーボドライバ、サーボモータの接続
ここからは、各パーツのつなぎ方を紹介していきます。
ラズパイ4のピン配置
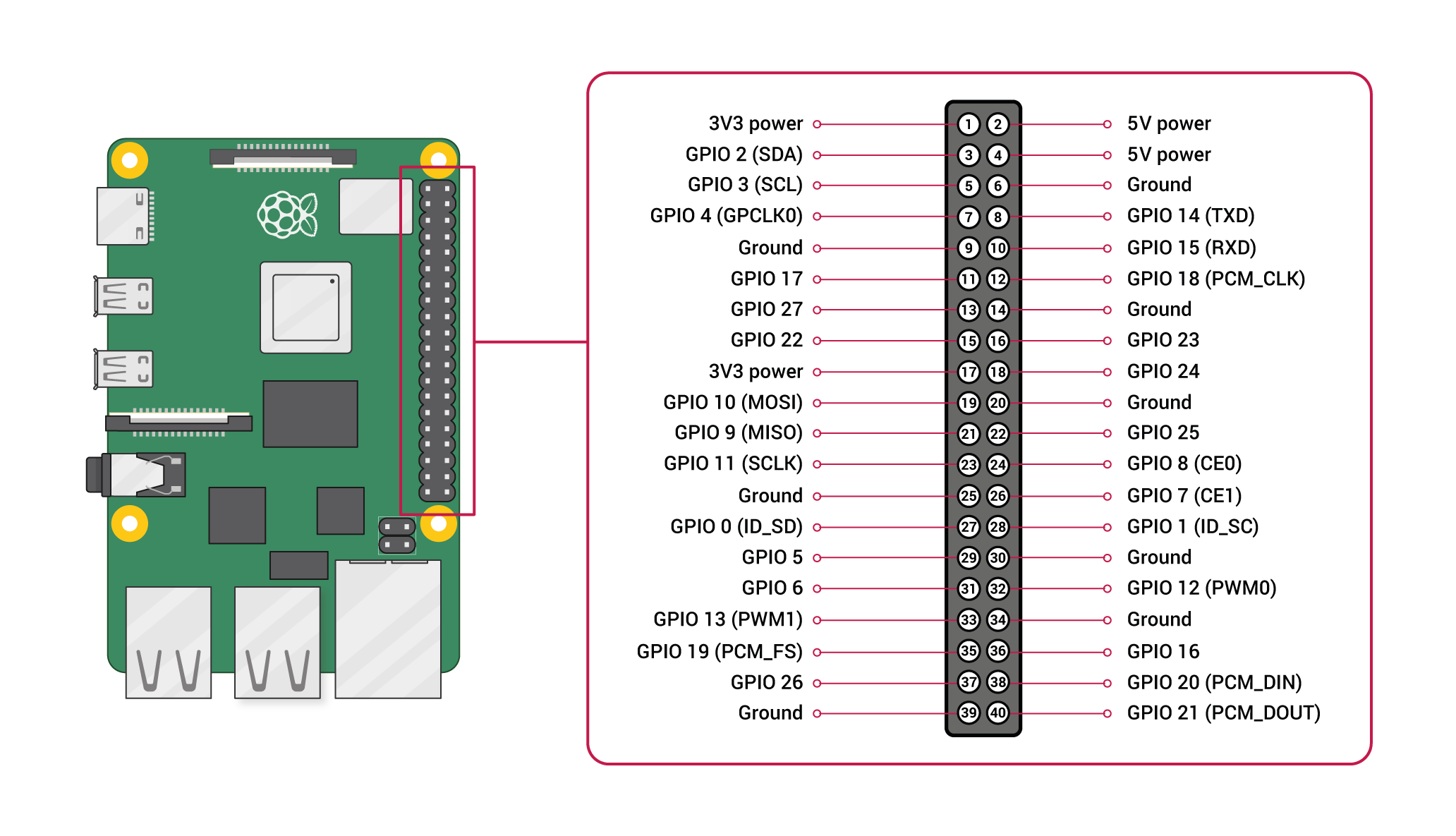
初めに、ラズパイ4のピン配置を載せます。
ラズパイ ピン配置 引用:Raspberry Pi 公式ドキュメント
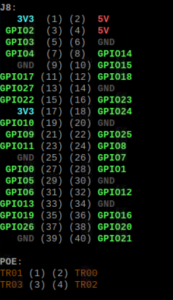
また、ラズパイのピン配置は、ターミナルからも確認できます。
下記のコマンドを入力すると、ターミナル画面にラズパイのピン配置が表示されます。
$ pinout
サーボモータは、I2C接続で制御するので、
3ピン:GPIO2(SDA)、5ピン:GPIO3(SCL)を使用します。
以下で、各部品の接続について説明します。
ラズパイ、サーバドライバー、サーボモータの回路図
回路図はこちら。
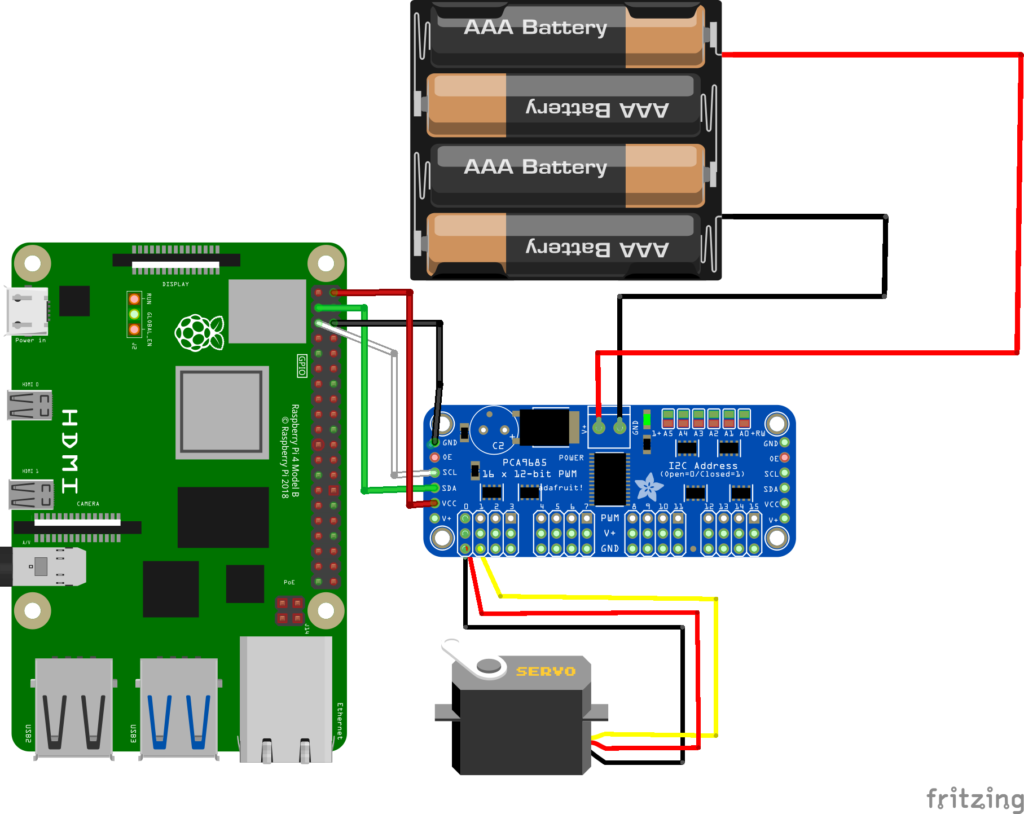
ラズパイとサーボモータドライバ(PCA9685)は、下記のとおり接続しています。
ラズパイ:2ピン(5V) - ドライバ : VCC
ラズパイ:3ピン(SDA) - ドライバ : SDA
ラズパイ:5ピン(SCL) - ドライバ : SCL
ラズパイ:6ピン(GND) - ドライバ : GND
各部品を接続すると、こんな感じです。
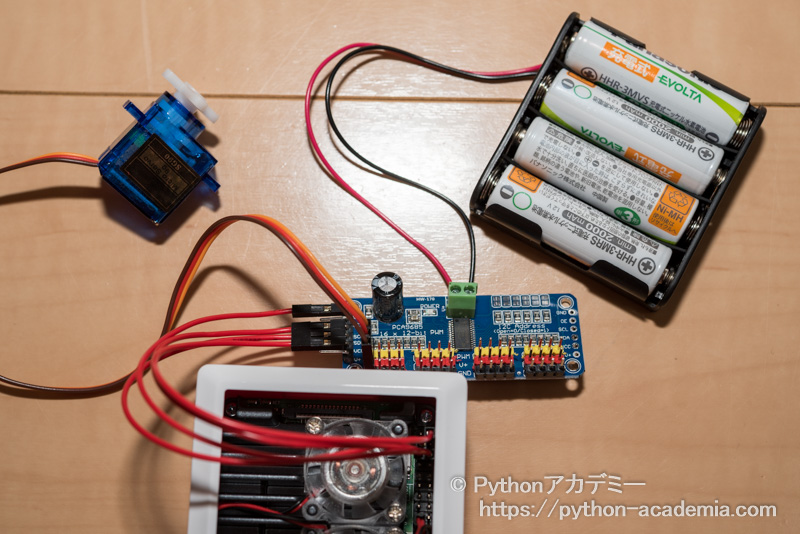
ここまでで、ラズパイと各部品の接続は完了しました。
次は、サーボモータを制御するために、I2C接続の設定を行います。
スポンサーリンク
ラズパイとサーボドライバ(PCA9685)のI2C接続設定
ラズパイからサーボモータを制御するために、I2C接続の設定を行います。
I2Cとは、Inter Integrate Circuitの略で、周辺デバイスとシリアル通信を行うための方式になります。
パーティライン構成が可能で、1つのマスタから複数のスレーブを制御することができます。
I2C通信について詳しく知りたい方は、こちらのサイトが参考になります。
では、ラズパイでI2C通信を有効にする手順について紹介していきます。
ラズパイ(Raspberry Pi)のI2C通信を有効にする
ラズパイのI2C通信を有効にします。
「設定」 → 「RaspberryPi の設定」の順に進みます。
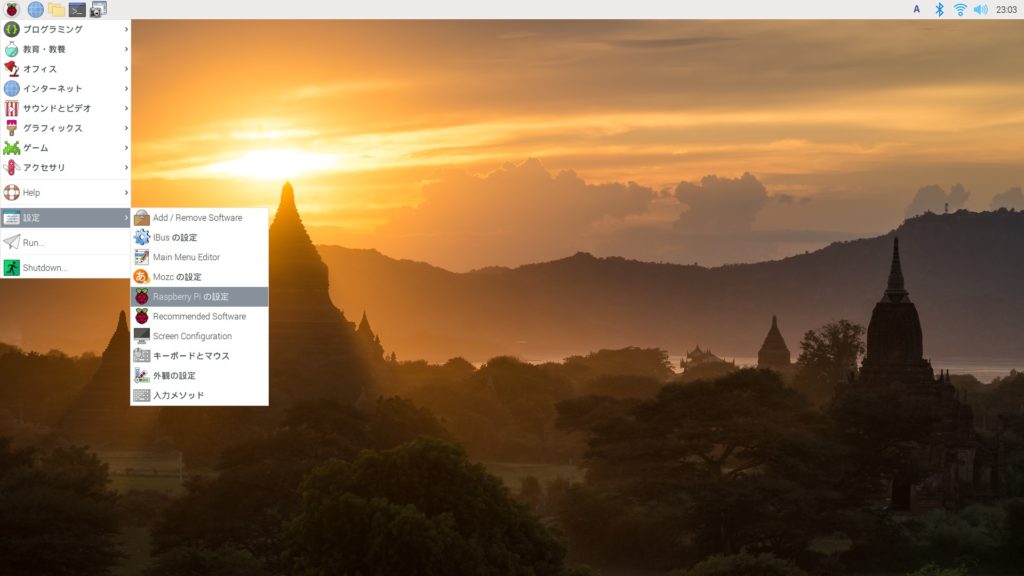
インターフェースタブで、"I2C" を有効にします。
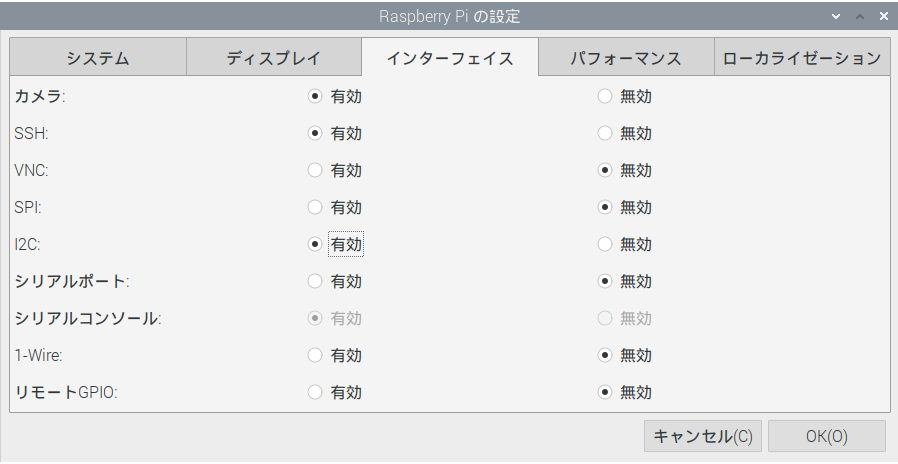
これで、ラズパイでI2C通信ができるようになりました。
PCA9685がI2C接続できているか確認する
PCA9685がI2C接続できているか確認します。
また、この操作により、PCA9685を制御するためのチャンネルを確認できます。
下記のコマンドをターミナルに入力します。
$ sudo i2cdetect -y 1下記画像のような結果が出れば正しく接続されています。
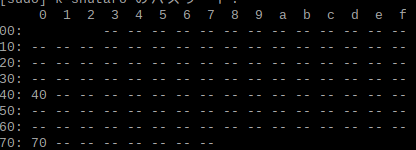
なお、PCA9685との通信用のチャンネルとして、0x40を使用すれば良いことも読み取れます。
必要なライブラリのダウンロード
サーボドライバを制御するために必要なライブラリを準備します。
AdafruitのGitサイトから、必要なライブラリをダウンロードします。
ターミナルに、下記のコマンドを入力すると、ライブラリをダウンロードできます。
$ git clone https://github.com/adafruit/Adafruit_Python_PCA9685.git
$ git clone https://github.com/adafruit/Adafruit_Python_GPIO.git
$ git clone https://github.com/adafruit/Adafruit_Python_PureIO.gitライブラリは、/home/"ユーザー"の階層にダウンロードされています。
ダウンロードしたライブラリをPythonにインストールします。
下記のコマンドをターミナルに入力します。Python3にも念のためインストールしています。
$ cd Adafruit_Python_PCA9685
$ sudo python setup.py install
$ sudo python3 setup.py install
$ cd ../Adafruit_Python_GPIO
$ sudo python setup.py install
$ sudo python3 setup.py install
$ cd ../Adafruit_Python_PureIO
$ sudo python setup.py install
$ sudo python3 setup.py installPythonのサンプルコード
ここからは、サーボモータを制御するためのPythonのサンプルコードを紹介します。
制御コードを理解する前に、サーボモータの仕様を理解する必要があるので、
はじめに、サーボモータ SG90の仕様を載せておきます。
サーボモータ SG90の仕様
サーボモータ SG90の仕様
| 項目 | 仕様 |
|---|---|
| PWMサイクル | 20ms |
| 制御パルス | 0.5ms~2.4ms |
| 制御角 | ±約90°(180°) |
| 動作速度 | 0.1秒/60° |
| 動作電圧 | 4.8V(~5V) |
色々書いてありますが、制御パルス0.5ms ~ 2.4ms で、制御角:±90° という情報がポイントです。
ラズパイにサーボモータを直接接続する場合は、この制御パルスに従ってコードを作成する必要があります。
しかし、今回はモータードライバ(PCA9685)を介して繋いでいるので、
先ほどインストールした、モータードライバ用のライブラリを用いて、
モータードライバ用のパルスを送信します。
サンプルコード
モータードライバ(PCA9685)でサーボモーターを制御するサンプルコードを紹介します。
コードは、下記のサイトを参考にさせていただきました。
Qiita : PCA9685で複数サーボモーターをコントロール
SG90の制御角は180°なので、0~180°を1°ずつ動かしてみています。
import Adafruit_PCA9685
import time
class servo_Class:
#ChannelはPCA9685のサーボモータの接続チャンネル
#ZeroOffsetはサーボモータの基準位置調節用パラメータ
def __init__(self, Channel, ZeroOffset):
self.Channel = Channel
self.ZeroOffset = ZeroOffset
#Adafruit_PCA9685の初期化
self.pwm = Adafruit_PCA9685.PCA9685(address=0x40)
self.pwm.set_pwm_freq(int(60))
# 角度設定
def SetPos(self,pos):
#PCA9685はパルスで角度を制御しており、パルス150~650が角度0~180に対応
pulse = int((650-150)/180*pos+150+self.ZeroOffset)
self.pwm.set_pwm(self.Channel, 0, pulse)
# 終了処理
def Cleanup(self):
#サーボを90°にセット
self.SetPos(int(90))
print('90')
if __name__ == '__main__':
Servo0 = servo_Class(Channel=0, ZeroOffset=0)
try:
while True:
for deg in range(180) :
Servo0.SetPos(int(deg))
print(deg)
time.sleep(0.05)
except KeyboardInterrupt:
print("\nCtl+C")
except Exception as e:
print(str(e))
finally:
Servo0.Cleanup()
print("\nexit program")※このコードでラズパイ上は動作していますが、サイト移植時にインデントを手打ちしています。
もしエラーが出た場合は、インデント部分を確認いただければと思います。
その他不具合がある場合は、コメント欄に記載いただければこちらで確認します。(可能な範囲で笑)
~コマンドの簡単な解説~
★Channel
今回はサーボモータは1つしか制御していないので、Channelは0しかありませんが、
Channelを増やすことで複数のサーボモータを制御できるようになります。
Servo0 = servo_Class(Channel=0, ZeroOffset=0)
Servo1 = servo_Class(Channel=1, ZeroOffset=0)
Servo2 = servo_Class(Channel=2, ZeroOffset=0)
★角度設定
角度をパルス値へと変換しています。
PCA9685では、パルス150~650が角度の0~180に対応しています。
そのため、 (650-150)/180 で1度あたりのパルスを算出した後、所望の角度をかけることで、
角度をパルス値に変換しています。
また、0degがパルス値150に対応するため、150を足しています。
最後に、サーボモータが動いている様子を載せます。
スポンサーリンク
まとめ
ラズパイで、モータードライバ(PCA9685)を介してサーボモーターを制御する方法を紹介していきました。
サーボモータの制御は、電子工作の基本なので、初心者の方は是非チャレンジしてみてください。
スポンサーリンク